Mat der schneller Entwécklung vun der kënschtlecher Intelligenz a Robotik ginn humanoid Roboter lues a lues zu neie Partner fir intelligent Fabrikatioun a fir zukünfteg Liewen. An dësem Beräich bestëmmt de Servomotor, als "Häerz" vum humanoide Roboter, direkt d'Beweegungsgenauegkeet a Stabilitéit vum Roboter. De Start an de Betrib vum Servomotor hänkt vun engem dedizéierten Servoantrieb of, an de Steierschaltkrees am Undriff ass verantwortlech fir d'genau Kontroll vum Stroum.
An dësem Prozess spille Kondensatoren am Servomotorundriff eng wichteg Roll, an si sinn de Schlësselfaktor fir den effiziente Betrib vum humanoide Roboter ze garantéieren.
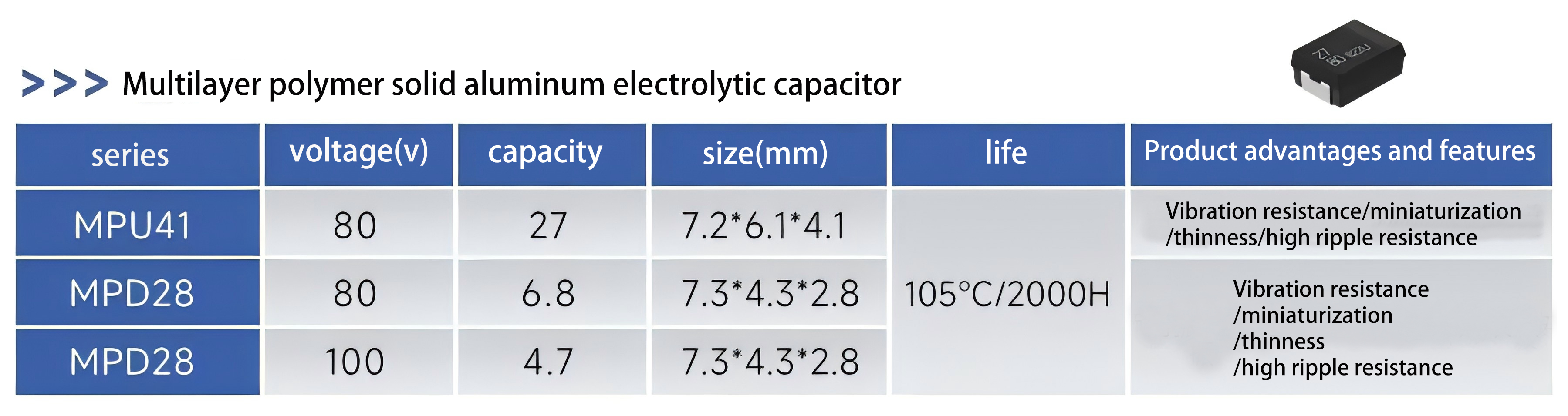
Elektrolytkondensator fir fest Aluminium-Multilagpolymeren:
01 Schwéngungsbeständegkeet
Humanoid Roboter erliewen dacks mechanesch Schwéngungen beim Ausféiere vun Aufgaben, besonnesch an dynameschen Ëmfeld. D'Vibratiounsbeständegkeet vunElektrolytkondensatoren aus massivem Aluminium aus méischichtegem Polymergarantéiert, datt se ënner dëse Schwéngunge weiderhin stabil funktionéiere kënnen, an net ufälleg fir Ausfäll oder Leeschtungsverschlechterung sinn, wouduerch d'Zouverlässegkeet an d'Liewensdauer vun de Servomotorundriff verbessert ginn.
02 Miniaturiséierung an Dënnheet
Humanoid Roboter hunn streng Ufuerderungen u Raum a Gewiicht, besonnesch a Gelenker a kompakte Raim. D'Miniaturiséierung an d'Dënnheet vun de Multilayer-Polymer-Massivaluminium-Elektrolytkondensatoren erméiglechen et hinnen, eng méi staark Kapazitéitsleistung an engem limitéierte Raum ze liwweren, wat hëlleft, d'Gréisst a Gewiicht vum Motorundriff ze reduzéieren an d'Raumnutzungseffizienz an d'Bewegungsflexibilitéit vum Gesamtsystem ze verbesseren.
03 Héije Ripplestroumwidderstand
Elektrolytkondensatore aus Multischichtepolymer-Massivaluminium hunn en exzellenten héije Ripplestroumwidderstand. Hir niddreg ESR-Charakteristiken (Äquivalent Seriewiderstand) kënnen effektiv héichfrequent Geräischer a Ripple am Stroum filteren, wouduerch den Afloss vum Geräischer vum Stroumversuergung op déi präzis Steierung vum Servomotor vermeit gëtt, wouduerch d'Leeschtungsqualitéit vum Undriff an d'Genauegkeet vun der Motorsteierung verbessert ginn.
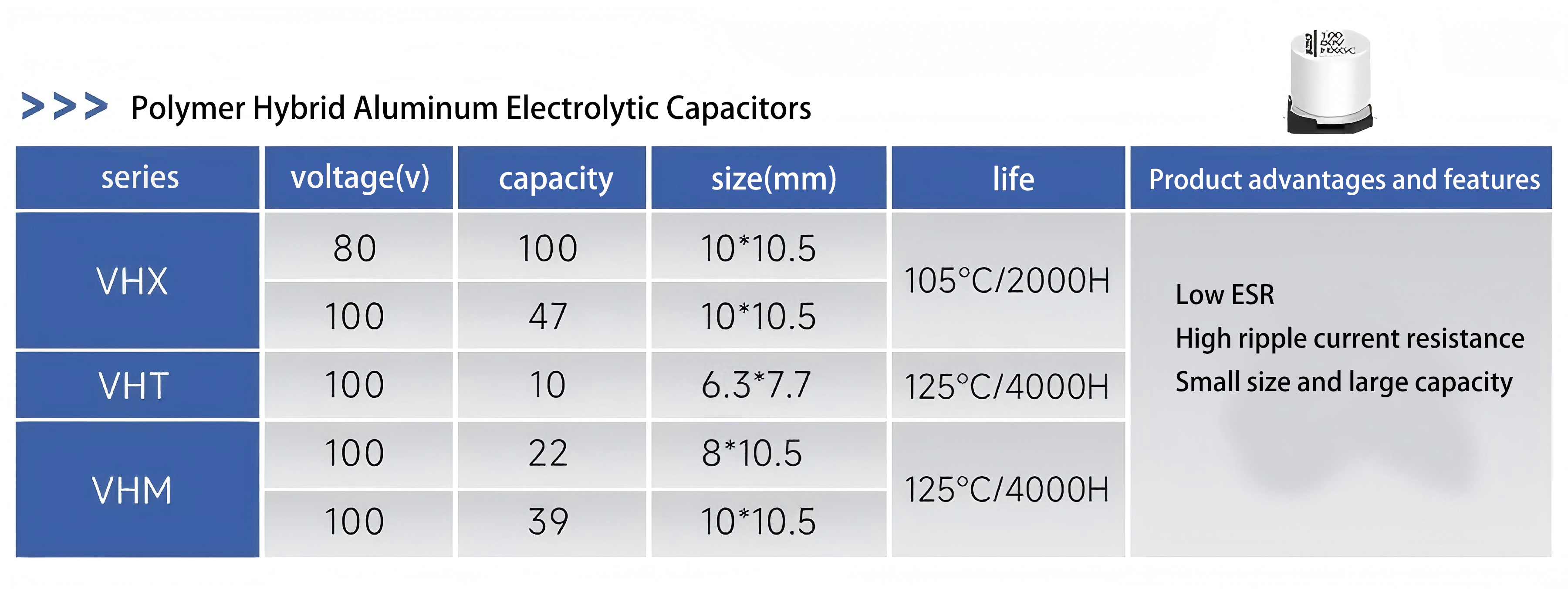
Polymer Hybrid Aluminium Elektrolytkondensatoren
01 Niddreg ESR (gläichwäerteg Serienwiderstand)
Polymer-Hybrid-Aluminium-Elektrolytkondensatorenhunn eng niddreg ESR-Charakteristik, wat hëlleft d'Hëtztbildung am Stroumkrees ze reduzéieren an d'Liewensdauer vum Kondensator ze erhéijen. Seng Uwendung a Servomotorundriff kann den Energieverloscht effektiv reduzéieren, d'Stabilitéit an d'Genauegkeet vun de Motorundriffsignaler garantéieren an doduerch e méi effizient Energiemanagement erreechen.
02 Héicht Ripplestroumwidderstand
Polymer-Hybrid-Aluminium-Elektrolytkondensatoren hunn eng exzellent Leeschtung bei héijem Ripplestroumwidderstand, kënne groussen Stroumschwankungen aushalen a garantéieren e stabile Betrib an Aarbechtsëmfeld mat héijer Frequenz a staarker Stroumännerung. Dës Funktioun erméiglecht et, effektiv Geräischer a Ripplen am Stroum a Servomotorundriff ze filteren, den Afloss vu Stroumschwankungen op d'Beweegungssteierung vum Roboter ze verhënneren an d'Stabilitéit a Genauegkeet vum Roboter bei héijer Geschwindegkeet a komplexen Operatiounen ze garantéieren.
03 Kleng Gréisst a grouss Kapazitéit
Den Design vun de Polymer-Hybrid-Aluminium-Elektrolytkondensatoren aus klengem Format erméiglecht et hinnen, eng grouss Kapazitéitsleistung an engem limitéierte Raum ze liwweren, besonnesch gëeegent fir Gelenker vun humanoide Roboter an aner kompakt Deeler. Déi grouss Energiespeicherkapazitéit reduzéiert net nëmmen d'Plazbelaaschtung, mä garantéiert och, datt de Roboter kontinuéierlech a stabil Stroum liwwere kann, wann hien Aufgaben mat héijer Belaaschtung ausféiert, wat d'Bedierfnesser vun engem effiziente Fueren erfëllt.
D'Uwendung vu Multilayer-Polymer-Massivaluminium-Elektrolytkondensatoren & Polymer-Hybridaluminium-Elektrolytkondensatoren a Servomotorantrieber vu humanoide Roboter bitt Roboter ouni Zweiwel eng méi effizient, stabil an dauerhaft Energieversuergung. Duerch d'Optimiséierung vum Energiemanagement, d'Verbesserung vun der Genauegkeet vum Motorundriff an d'Verbesserung vun der Systemstabilitéit si si zu engem wichtegen Deel vun der Sécherung vum effiziente Betrib vu Roboter ginn.
Zäitpunkt vun der Verëffentlechung: 24. Februar 2025